What is the Lever-Arm or Rock Back effect?

At the end of a brake stop, the car often rocks backwards as the suspension settles. This can be referred to as the 'lever-arm effect' or 'rock back'.
Conducting brake tests on tall vehicles with long suspension travel can result in a speed overshoot of the velocity data, due to the measurements being taken at the high roof position of the GPS antenna. As the brakes are initially applied, there is a higher rate of change in velocity at the roof than there is at the vehicle's centre of gravity (COG).
|
In this example, including the measured overshoot in velocity, the stopping distance shown in the graph is 25.23 m. With the overshoot removed, the stopping distance is 25.15 m.
The VBOX uses 0.8 km/h as a threshold for measuring braking distance, and this eliminates 99% of these cases.
Note: In the example to the left, the minimum speed before the rock back was 0.69 km/h, which is below the 0.8 km/h threshold, so this has been eliminated. |
.gif?revision=1) |
The integration of an IMU04 with a suitably upgraded VBOX 3i can be used to counteract this 'lever-arm' effect by placing the IMU at the COG, which measures the vehicle pitch as it brakes. This data, when combined with that from GPS, provides a compensation for the overshoot and allows for consistent brake stop testing.
.jpg?revision=1)
The graphs below show how point A has travelled further than point B:
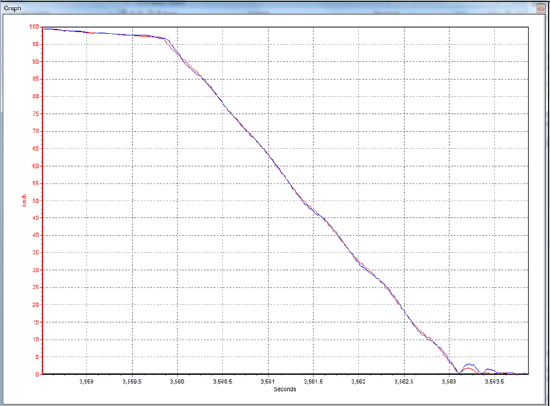 |
In this example of a high-dynamic brake stop, the blue trace (GPS Speed) overshoots at the initial point of brake application, and then exhibits a damped oscillation as the deceleration continues. The IMU-corrected data (red trace) accurately records the brake stop from the vehicles centre of gravity. |
Counteracting the lever-arm effect will also aid test engineers when conducting high-dynamic manoeuvres other than brake stops. In slip angle measurements the speed overshoot can occur if the antenna is moving through a greater arc of travel than that of the vehicle's centre of gravity as it corners. Procedures such as lane change manoeuvres can therefore benefit from IMU integration and lever-arm compensation.
.png?revision=1)
Orange = Pitch measured by the IMU, Blue = GPS speed, Red = IMU corrected GPS speed
The traces between the green and red vertical lines are of a car going over a speed hump. Note how the GPS speed alters as the vehicle roof moves independently of the COG as it goes over the hump. The integrated speed logs the correct speed of the vehicle.
See also: