Kalman Filter Calibration With VBOX Omega
IMU integration is always enabled, therefore it is recommended that you perform the full calibration procedure before you start to perform tests. The calibration procedure is a series of specific manoeuvres that will quickly allow the Kalman Filter to characterise the outputs from the IMU.
If you do not perform the calibration procedure, the Kalman Filter will still function. It may not, however, produce a high level of accuracy until after dynamic manoeuvres in the X and Y plane have been performed (i.e. left and right-hand turns, braking and accelerating) which could take several minutes of driving.
Recommended procedure
- Park the vehicle in an open area where the GNSS antenna has a clear view of the sky. Remain static and wait for VBOX Omega to complete the 30-second stationary initialisation. The process is indicated on the Front Panel. If the vehicle moves before the initialisation finishes, the 30-second process will restart when the vehicle is stationary again.
- When the front panel states 'Waiting for Movement', drive forward to complete the initialisation of the IMU. Continue to an open area to perform the calibration procedure.
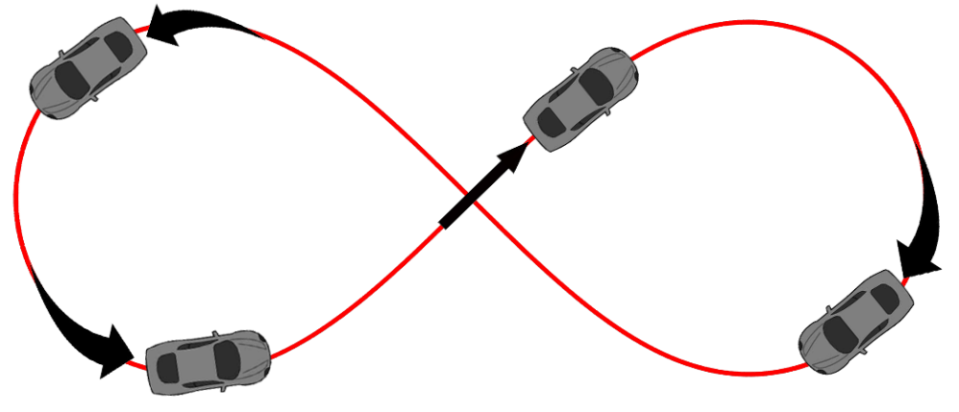
- Drive in a ‘figure of eight’ at least twice. These can be as small as 5 m in radius (almost full-lock in some vehicles), but a 10 m radius is a better size. The vehicle should be travelling at a speed of more than 5 km/h during this procedure to generate sufficient forces for the calibration process.
- Accelerate hard from a standstill to 50 km/h or above. Perform a brake stop with a deceleration force of at least 0.5 g. You must perform this step twice.

When is the calibration required?
When you are carrying out high-dynamic tests such as braking and ESC testing, this process will calibrates the Kalman Filter as quickly as possible. When you are carrying out low-dynamic tests such as driving on urban routes or doing long term data collection, this calibration is not as critical.
Re-running the calibration
The Kalman Filter is constantly adapting its calibration depending on the information it receives from the GNSS receiver and the IMU. Therefore, if the vehicle is left stationary for a long time, you should repeat the calibration procedure if you need to perform further high-dynamic testing.
The calibration should also be repeated when:
- You power cycle VBOX Omega.
- You change the IMU settings through either the VBOX Setup Software or the Front Panel.
- You use the VBOX Setup Software to read the VBOX Omega settings.
- You perform a GNSS Coldstart.