VIPS - Technical Specification
Rover Specifications
Velocity |
|
|---|---|
| Accuracy (averaged over 4 samples) | 0.1 km/h (averaged over 4 samples) |
| Accuracy (Standalone VIPS) | 1 km/h (95% confidence) |
| Update rate | 100 Hz |
| Maximum velocity | 300 km/h |
| Minimum velocity | 0.1 km/h |
| Resolution | 0.01 km/h |
| Latency | 60 ms |
Relative Positioning |
|
|---|---|
| Horizontal accuracy | <5 cm (95 % CEP*) |
| Update rate | 100 Hz |
| Height accuracy | 1 m (95% CEP*) |
| Absolute position | <10 cm (95% CEP*)^ |
Distance |
|
|---|---|
| Accuracy | 0.05% (<50 cm per km) |
| Update rate | 100 Hz |
| Resolution | 1 cm |
Acceleration |
|
|---|---|
| Accuracy | 0.5 % |
| Maximum | 20 g |
| Resolution | 0.01 g |
| Update rate | 100 Hz |
Heading |
|
|---|---|
| Resolution | 0.01° |
| Update rate | 100 Hz |
| Accuracy (VB3i Kalman Filtered) | 0.1° (95% confidence at 60 km/h) |
| Accuracy (Standalone VIPS) | 0.4° (95% confidence at 60 km/h) |
Time |
|
|---|---|
| Resolution | 0.01 s |
| Accuracy | 30 ns |
Brake Stop Accuracy (Trigger activated) |
|
|---|---|
| Accuracy | 5 cm** |
Definitions
* Circle of Error Probable (CEP): 95 % of the time the position readings will fall within a circle of the stated diameter
** Based on <50 m brake stop distance
^ Subject to accurate site survey and installation
UWB Radio |
|
|---|---|
| Frequency | 3.64 – 4.38 GHz or 6.16 – 6.69 GHz |
| Transmit power (peak / average) | 0 dBm / -41.3 dBm |
Outputs
Rover
RS232 Output |
|
|---|---|
| RS232 Port 1 | Position and velocity |
| RS232 Port 2 | IMU04 data |
| Output data rate | 100 Hz |
Digital Output |
|
|---|---|
| Signal levels | Low = 0 V, High = 5 V |
| Output type | 1 PPS* |
Beacon
RS232 Output |
|
|---|---|
| RS232 Port 1 | Configuration only |
Inputs
Rover
Unit Power |
|
|---|---|
| Input voltage range | 6.5 – 30 V DC |
| Power consumption | <3 W |
Digital Input |
|
|---|---|
| Input Function | 1 PPS* |
Beacon
Unit Power |
|
|---|---|
| Input voltage range | 6.5 – 30 V DC |
| Power consumption | 2 W |
Rover IMU Specifications
|
Gyroscopes (Angular rate sensors) |
Accelerometers |
|
|---|---|---|
| Dynamic range | ±450°/s | ± 20 g |
| Nonlinearity | 0.01 % of full scale | 0.1 % of full scale |
| Resolution | 16-bit ADC (0.014°/s) | 16-bit ADC (0.15 mg) |
| Bandwidth | 50 Hz | 50 Hz |
| Noise density | 0.01°/s/√Hz | 60 µg/√Hz |
| Bias stability | 0.003°/s | 15 µg |
| Bias repeatability (1 year) | 0.2°/s | 0.005 g |
Environmental and Physical
| IP rating | IP 67 |
| Operating temperature | -30°C to +60°C |
| Storage temperature | -40°C to +85°C |
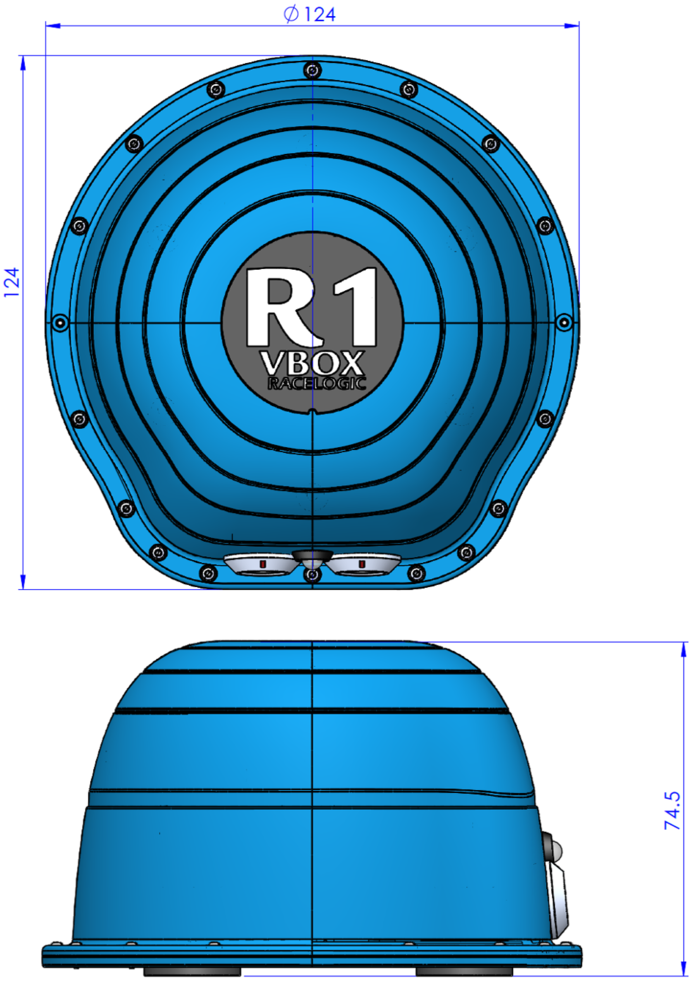
| Size (of each beacon/rover) | 124 x 124 x 74.5 mm (l x w x h) |
| Weight (of each beacon/rover) | 350 g |
Beacon/Rover Dimensions
Measured in mm.