Channel Name Definitions - Ref B to Road Lines
| Channel Name | Description | Unit |
|---|---|---|
|
RangeB-L1 |
The lateral distance between Line Reference Point B to Line 1. This channel is measured perpendicularly to the surveyed line.
|
m |
| TTCB-L1 |
The Time To Cross of Line Reference Point B crossing Line 1 given the vehicle's current lateral speed towards the line.
|
s |
| LatSpdsvB-L1 |
The Lateral Speed of Line Reference Point B towards Line 1.
|
kmh |
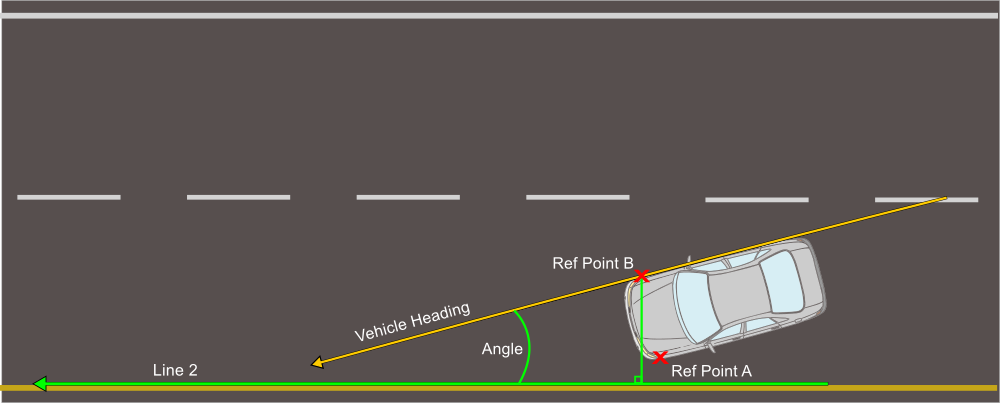
| AnglesvB-L1 |
The Angle between Line Reference Point B and the tangent of Line 1.
|
° |
| Status-sv |
The DGPS Status of the Subject Vehicle.
|
|
| CurvatureL1-B | The Curvature of Line 1 at the point closest to Line Reference Point B. | 1/m |
| RangeB-L2 |
The lateral distance between Line Reference Point B to Line 2. This channel is measured perpendicularly to the surveyed line.
|
m |
| TTCB-L2 |
The Time To Cross of Line Reference Point B crossing Line 2 given the vehicle's current lateral speed towards the line.
|
s |
| LatSpdsvB-L2 |
The Lateral Speed of Line Reference Point A towards Line 2.
|
kmh |
| AnglesvB-L2 |
The Angle between Line Reference Point B and the tangent of Line 2.
|
° |
| CurvatureL2-B | The Curvature of Line 2 at the point closest to Line Reference Point B. | 1/m |
| RangeB-L3 |
This channel is measured perpendicularly to the surveyed line.
|
m |
| TTCB-L3 |
The Time To Cross of Line Reference Point B crossing Line 3 given the vehicle's current lateral speed towards the line.
|
s |
| LatSpdsvB-L3 |
The Lateral Speed of Line Reference Point B towards Line 3.
|
kmh |
| AnglesvB-L3 |
The Angle between Line Reference Point B and the tangent of Line 3.
|
° |
| Curvature3-B | The Curvature of Line 3 at the point closest to Line Reference Point B. | 1/m |









Determining Range From a Curved Line
When testing around a curved lane, the VBOX firmware takes measurements from the corner position to the nearest perpendicular tangent line to the curved lane edge, as shown below.
