Smoothing - 1 Target Vehicle
To configure the smoothing levels when testing with a 1 Target Vehicle for ACC, AEB, BSD or FCW tests, please follow the steps below:
If the box is set into twin antenna mode, the smoothing menu will not be present as the calculations will run off of the True heading provided by the twin antenna lock.
It is recommended that if user intends to set multiple points on the car, they enable the dual antenna.
There are two configurable variables linked to heading smoothing; ‘Smoothing Distance’ and ‘Speed Threshold’. Due to the nature of the vehicle separation measurement and calculation process many channels are derived using the heading of the vehicle which can inherently be noisy. To overcome this heading can be smoothed with a dynamic smoothing routine.
Smoothing Distance
|
The vehicle heading is normally calculated between the current and previous sample. Even with the stability of RTK position GPS position can vary by a few millimetres with respect to the original. When the travelled distance between subsequent samples is short (low speeds) this leads to a potential larger potential error in the calculated heading. This smoothing routine allows the user to force a ‘Smoothing Distance’ over which heading is calculated. This is therefore dynamic, resulting in a variable number of samples used to determine the smoothing level on the heading; the lower the speed the more samples that are used. With 100 Hz logging and a smoothing distance of 1 m at 72 km/h, the heading is calculated over the previous 5 samples, whilst at 15 km/h the heading would be calculated over the previous 26 samples. |
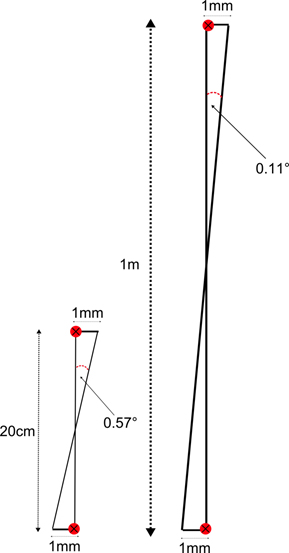 |
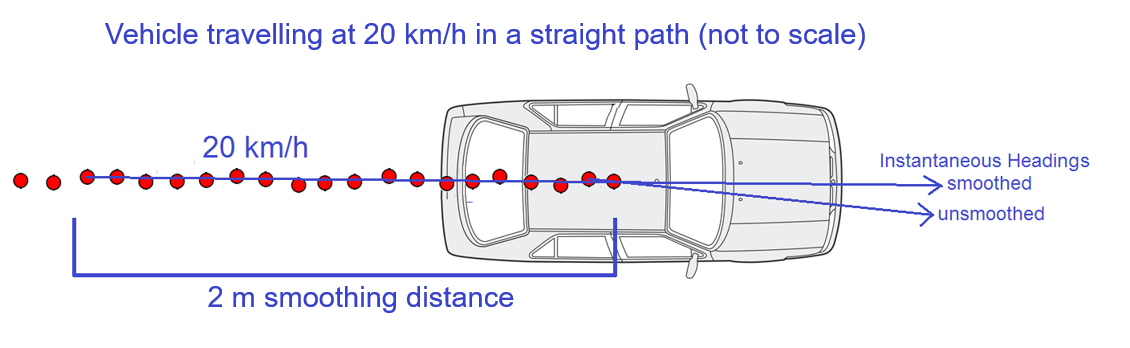
Above: Shows the improvement on vehicle heading from using smoothing distance
- Connect VBOX Manager to the VBOX within the Subject vehicle.
- Select the 'ADAS' option from the 'SETUP' menu and ensure '1 Target' is selected.
- Select 'Subject' within 'ADAS Function'.
- Scroll down to ‘Smoothing Dist.' and select.
- Choose the smoothing option between 0.00 m and 2.00 m. A smoothing distance of 2.00 m is recommended. Press to confirm.
Speed Threshold
Due to the large number of samples in a small distance when travelling at low speed the heading channel can become very noisy, this in turn results in many of the Vehicle Separation channels becoming noisy at low speed. When the speed threshold is set to a certain speed the heading is locked when the vehicle travels under that speed.
- To set the speed threshold, repeat steps 1 – 3 above and then select 'Spd. Threshold'.
- Enter the speed threshold value by pressing the scroll wheel to move along the digits and rotate to the desired number, selecting past the final digit will store the value. A speed threshold value of 5 km/h is recommended.