The IMU uses three MEMS (Micro Electro-Mechanical System) accelerometers to measure specific force. Put simply, the IMU’s accelerometers will measure all the forces opposing gravity, only in free fall will the reading be zero. Please click here for more information.
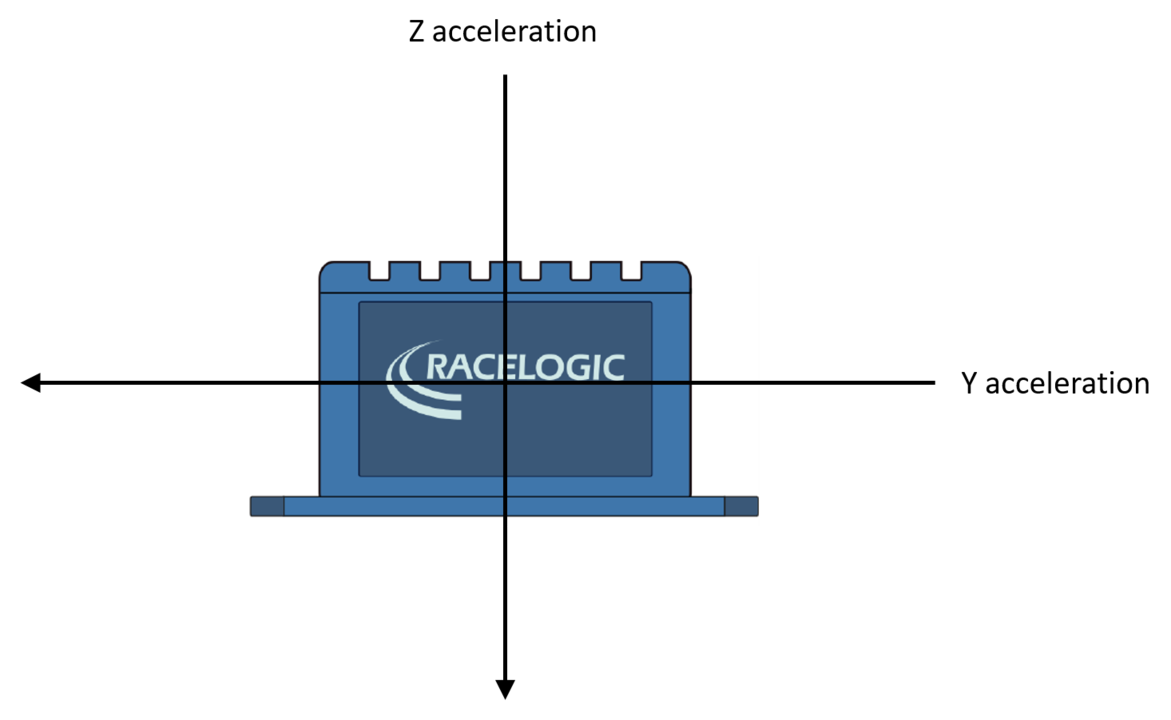
When the IMU is placed flat and level, so for instance on a desk, there is only one opposing force being applied and that will be in the Z plane (1 g). Due to the lack of force being applied in the X and Y planes, the IMU Lateral and Longitudinal acceleration measurements while stationary will remain zero.
A single accelerometer will measure the acceleration relative to the frame of the IMU and not the ground. So in the instance of a banked road, you would expect measurements in these planes (see image below).
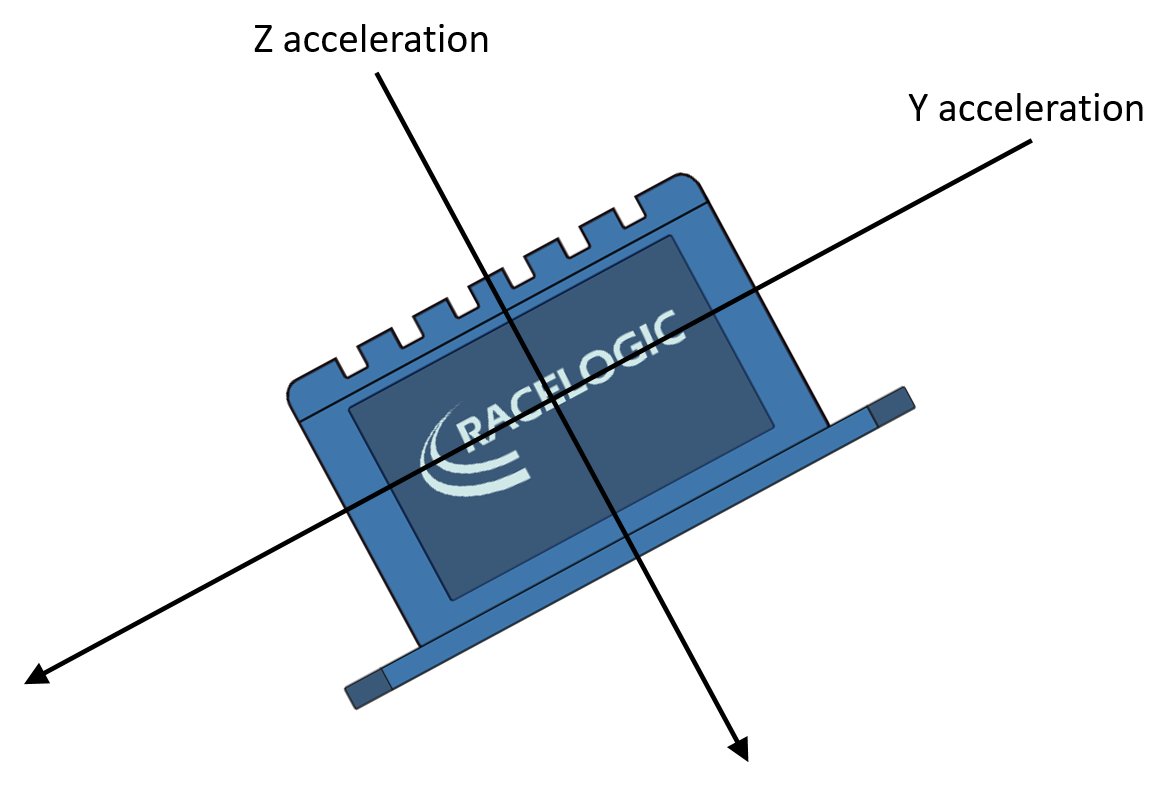
Nevertheless, the net acceleration of all three accelerometers will be the same regardless of the road being banked on not. If you wish to know the lateral and longitudinal acceleration measured in a two dimensional plane on a banked road.
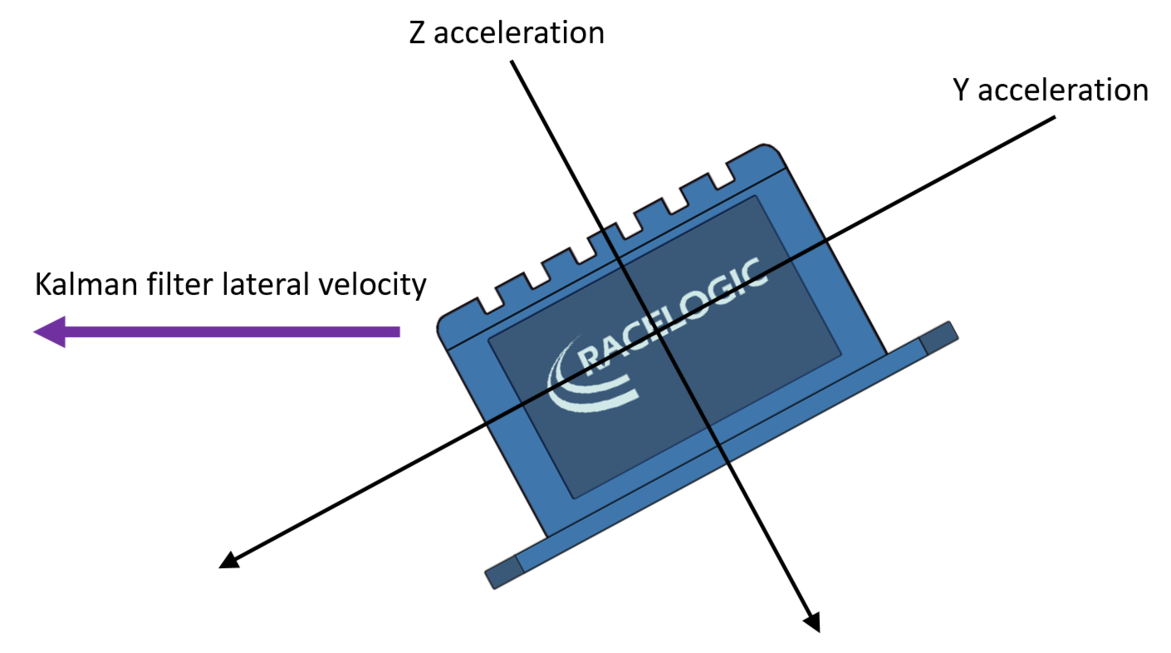
The Kalman filter will calculate lateral and longitudinal velocity using IMU and GPS data sources. From this a lateral and longitudinal acceleration force measurement will be calculated.