Release Notes – VBOX 3i v2.8
This version of the VBOX 3i firmware includes some significant changes and brings additional functionality to the unit itself, the Setup Software and VBOX Manager. The latest software and VBOX Manager versions should be used in conjunction with this firmware release to allow full use of the latest features.
- Download the latest VBOX3i, and VBOX Manager firmware and ensure the Setup Software is up to date.
- Instructions on how to upgrade the firmware can be found here.
Many of the changes have been made as a direct result of customer feedback requesting new features. Some changes have been made to fix bugs and other issues found during testing.
Racelogic strongly recommends that all users upgrade to the latest firmware release to take advantage of the new features and benefit from the improved stability.
|
IMPORTANT This firmware is for VB3i V3-V5 hardware only and older units that have been upgraded to be ‘IMU04 ready'. VBOX V3 variants start at serial number 32390 (Jan 2014). Look out for the silver 'IMU04 ready' sticker on your unit. |
Requirements
This version of VB3i firmware requires that VBOX Setup and VBOX Manager be updated to maintain compatibility, the minimum versions required are as follows:
- VBOX Setup version 3.1.4.636.
- VBOX Manager version 3.0.2341.
Enhancements/ New Features
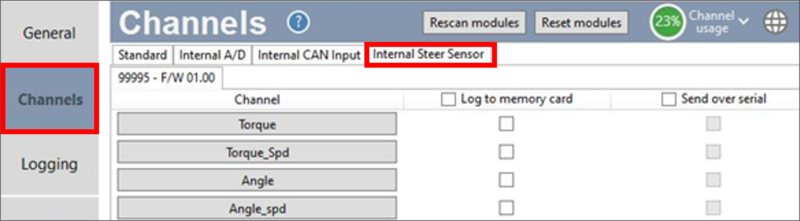
Steering Wheel Sensor Support
Racelogic Steering Wheel Sensor (RLSTSENSOR) is now officially supported. In previous firmware versions manual configuration including DBC file loading was required for the Steering Wheel Sensor setup. In firmware 2.8, VB3i will now automatically detect the Steering Wheel Sensor when connected to the Racelogic CAN bus. When detected, four signals will be available for logging and serial transmission (Torque Nm, Torque Speed Nm/s, Angle Deg, Angle Speed Deg/s).
Note: Steering Wheel Sensor signals are not available with an MFD (Multi-Function Display) when using the auto detect feature.
|
|
|

More information on the Steering Wheel Sensor can be found on the VBOX Automotive website and on the Support Centre here.
Lat and Long Velocity for Single Antenna Mode Added
Lateral and Longitudinal Velocity signals are now available on CAN for single antenna mode. These two parameters can be found on message 0x307, more information on these channels can be found here.
Note: Lateral and Longitudinal Velocity signals should only be used with a Kalman filter or dual antenna as an accurate body heading is required.
Slip Angle for Single Antenna Mode Added
Slip Angle is now available on CAN for single antenna mode. The signal can be found on messages 0x314 and 0x083.
Note: This signal should only be used with a Kalman filter or dual antenna as an accurate body heading is required.
ABD Path Follow Updated
CAN message 0x323 has been added for transmission when ABD Path Follow mode is enabled. More information on this is available here.
New CAN Channels
- ‘Stahle CAN Output’ CAN message set added - New Intel CAN message set added to software and firmware for Stahle robot system support.
- New CAN ID 0x32B - GPS Day H, GPS Day L, Diff Age, Serial Number and VBOX Type channels.
- Current CAN Output is available here.
Improvements and Fixes
-
Intermittent communication issue with IMU04 resolved
There was an issue present in firmware version 2.7 where the initial communications between VBOX 3i and IMU04 would at times fail. As a result, the Kalman filter will fail to initialise and run. This was an intermittent issue which would often require the user to power cycle the system. In version 2.8, a fix has been applied to ensure the IMU04 will successfully initialise.
Note: This issue was limited to 'IMU04 Ready' VBOX 3i’s with v2.7 firmware installed and an IMU04 connected. -
ADAS communication stability improved
Improvements have been made to the ADAS telemetry communications in firmware version 2.8. The wireless telemetry communication links are less susceptible to data and connection loss during VBOX to VBOX data transmission. VBOX 3i ADAS users can confirm the VBOX to VBOX link stability by monitoring the 'Link Time' channels made available by the VBOX 3i. If the Link Time channels excessively drop to zero during use an update to 2.8 will be recommended. -
LatSsv-tg ADAS parameter enhanced
Quality improvements have been made to the lateral and longitudinal speed (vehicle to vehicle) parameters. As a result users will benefit from a noise reduction on the two ADAS parameters. Due to the channel nature (rate of change) any steps or noise in vehicle range is amplified in their corresponding speed channels. Advanced logic has now been applied to the lateral and longitudinal parameters in order to produce a cleaner, noise reduced speed parameter set without compromising accuracy. -
IMU Kalman Filter Robot Blend function change
Kalman Filter position clamp has changed from 2 mm per sample to 1 mm per sample. This change offers a smoother position and heading transition once GNSS lock as been established after a GNSS signal degrade/denial phase. -
Position Quality updated
Position Quality is a numeric status value produced by VBOX 3i for RTK robot path follow applications. The function has been reworked and simplified in version 2.8. More information about Position Quality can be found here. -
GPS Time Change
Time signal present on CAN message 0x314 has changed from UTC to GPS time. This means the time starts from GPS time since midnight. All other time outputs remain UTC unless specified. -
Static Point Speed channels resolved
In some instances, Latitude and Longitude Speed channels were not calculated, resulting in the output being set to 0. -
0x307 CAN frame resolved
In some instances, the 0x307 CAN frame would not be transmitted on the VCI port when selected. -
GNSS COM port baud rate reset after a Cold Start resolved
In some instances, the RTK/DGPS COM port baud rate could reset back to default after a GNSS receiver Cold Start.