5.5 IMU Menu

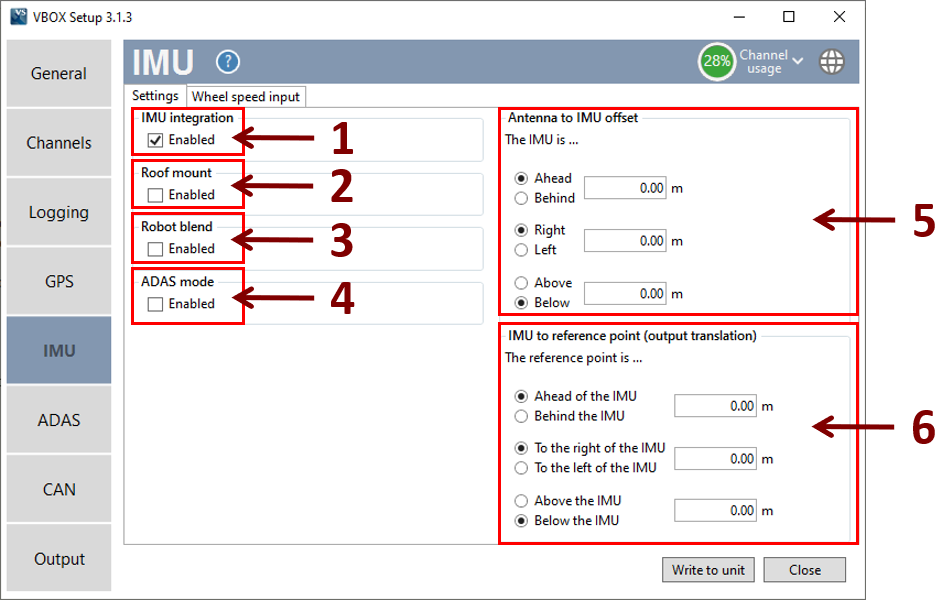
The IMU menu provides the ability to configure the IMU integration, location, robot blend, ADAS mode and offset position, as well as the wheel speed inputs.
Settings
Configure the IMU integration, location, robot blend, ADAS mode and offset position.
-
IMU Integration
This option turns on IMU integration. When enabled, the other IMU options are presented and GPS Optimisation is set to 'High'.
-
Roof Mount
Specifies whether the Racelogic roof mounted IMU will be used or not. When 'Enabled', an automatic 1 m z offset is added within the 'IMU to reference point' options, translating the filtered speed down in to the vehicle towards the centre of gravity and the 'Antenna to IMU offset' options will be greyed out.
-
Robot Blend
This option is a safety feature that should be utilised when using robot control. It prevents sudden position corrections, providing smooth return of position and heading.
-
ADAS Mode

Select between the ‘ADAS Mode Disabled’ Kalman Filter, used for Brake Stops and general speed/attitude performance, and the ‘ADAS Mode Enabled’ Kalman Filter that is used for high accurate position. It is selected by default when an ADAS mode is activated within the 'ADAS' menu.
-
Antenna to IMU Offset
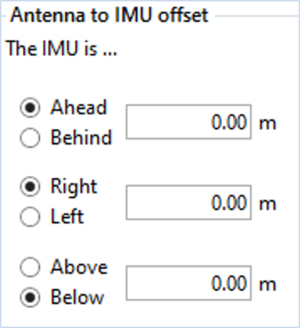
- When Roof Mount is 'Disabled' - Enter the x,y,z offset values from the IMU to the antenna, these are required for the Kalman Filter algorithm.
- When Roof Mount is 'Enabled' - 'Antenna to IMU offset' becomes greyed out and you can no longer enter any values, enter values in IMU to reference point instead.
-
IMU to Reference Point (Output Translation)
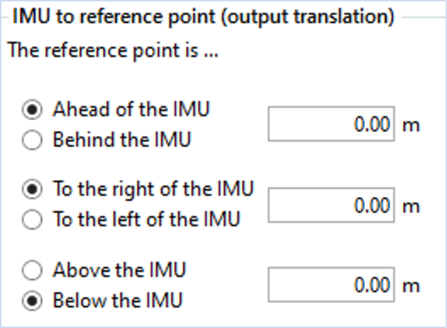
This option allows you to enter the x,y,z offset values from the nominated reference point to the IMU. This will translate the data from the IMU location to another point on the vehicle where all measurements will be made. When Roof Mount 'Enabled', an automatic 1 m z offset is added, translating the filtered speed down in to the vehicle towards the centre of gravity.
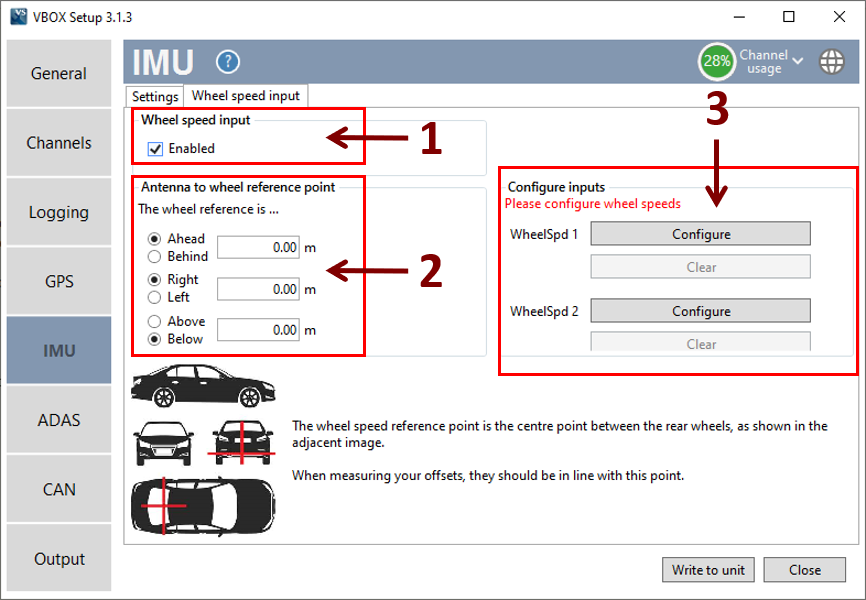
Wheel Speed Input
Note: This tab is only presented when IMU integration is 'Enabled' and firmware version 2.7 or later is being used.
The wheel speed input options can be used to configure the wheel speed input channels and reference location.
Combining wheel speed information within the Kalman Filter can improve positioning in locations subject to obstacles. In areas where there is no view of the sky at all, such as tunnels, inertial sensors and wheel-speeds can fill in the gaps for periods of up to 5 minutes.
IMPORTANT - Wheel speeds should not be used when conducting brake stops!
-
Enable Wheel Speed Input
Enables the wheel speeds to be passed into the Kalman Filter.
-
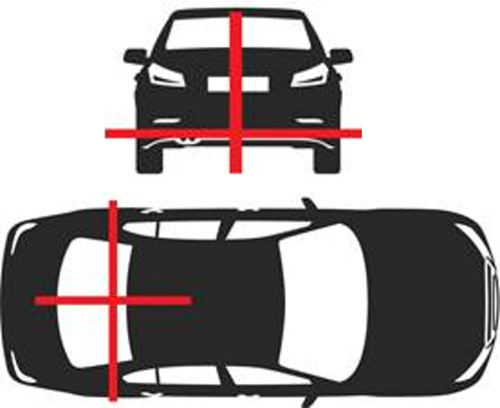
Antenna to Wheel Reference Point
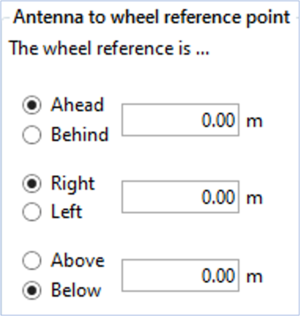
Specifies the x,y,z distances (m) between the wheel speed reference point and the antenna. The reference point is the centre point between the rear wheels, as shown in the image below.
-
Configure Inputs
Wheel speed 1 and 2 'Configure' buttons open up the CAN setup area where you can load in a .dbc file or manually set up the CAN parameters by selecting the 'User' option. Alternatively, selecting 'Vehicle database' enables you to browse the Racelogic Vehicle CAN database within the software and select your vehicle. Once selected, CAN channels specific to your vehicle will appear on the left. If available, CAN connection information for the vehicle will also appear on the right of the window. Click on a wheel speed channel and select 'OK' to save the configuration. Repeat for the other wheel speed channel. To remove a wheel speed channel, select the 'Clear' button.
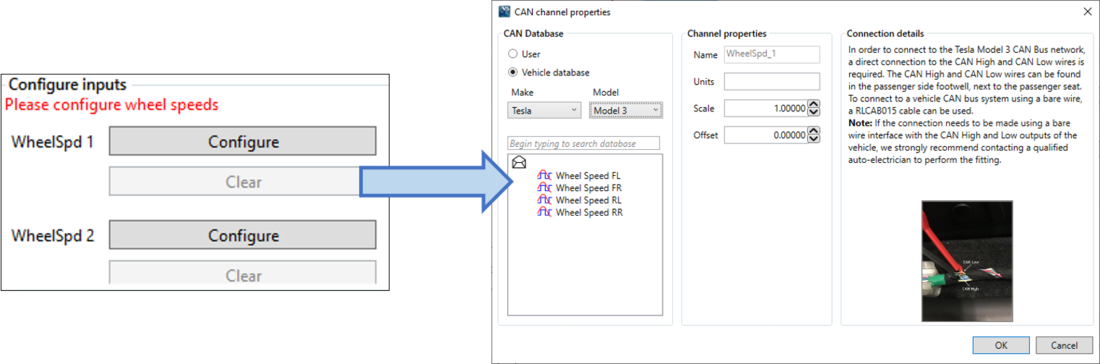
Note: If wheel speed input has been enabled, however the channels have not been configured, you will be reminded to configure the inputs.