Channel Name Definitions - Static Target 1
| Channel Name | Description | Unit |
|---|---|---|
|
Range_st1 |
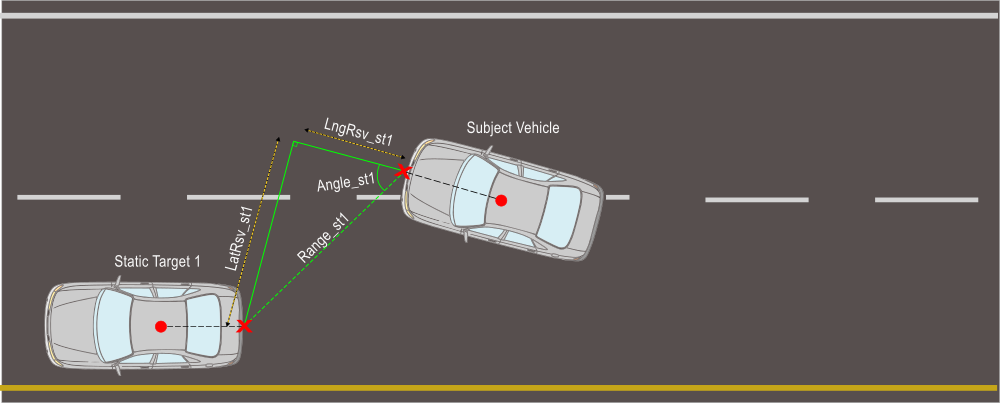
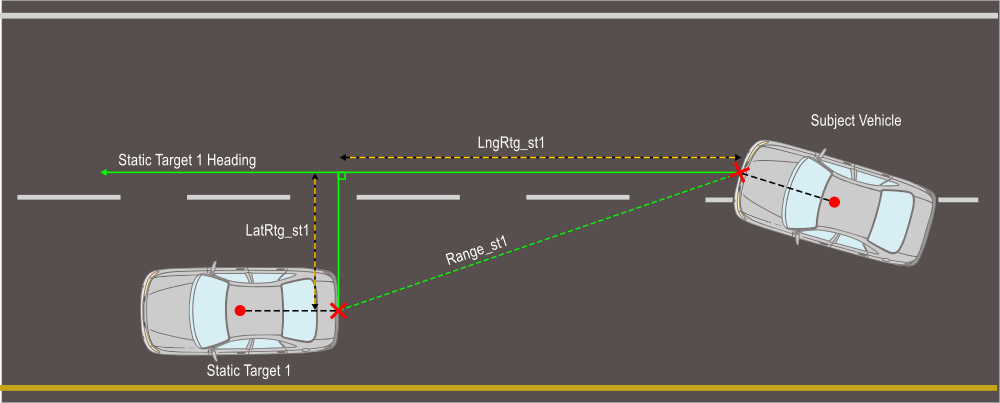
The direct distance between the nearest vehicle points of the Subject Vehicle and Static Target 1.
|
m |
| LngRsv_st1 |
The longitudinal distance between the nearest vehicle points of the Subject Vehicle and Static Target 1, measured in the direction of the subject vehicle's heading. The heading source will be "Robot_Head" in dual antenna mode or when IMU integration is enabled. It will use the position-derived heading in single antenna mode.
|
m |
| LatRsv_st1 |
The lateral distance between the nearest vehicle points of the Subject Vehicle and Static Target 1, measured at right angles to the subject vehicle's heading. The heading source will be "Robot_Head" in dual antenna mode or when IMU integration is enabled. It will use the position-derived heading in single antenna mode.
|
m |
| LongRref_st1 |
The longitudinal distance between the nearest vehicle points of the Subject Vehicle and Static Target 1 is measured with reference to the configured reference heading.
|
m |
| LatRref_st1 |
The lateral distance between the nearest vehicle points of the Subject Vehicle and Static Target 1 is measured with reference to the configured reference heading.
|
m |
| T2Csv_st1 |
The time to collision between the Subject Vehicle and Static Target 1, based on the subject vehicle's heading. The heading source will be "Robot_Head" in dual antenna mode or when IMU integration is enabled. It will use the position-derived heading in single antenna mode.
|
s |
| LngRtg_st1 |
The longitudinal distance between the nearest vehicle points of the Subject Vehicle and Static Target 1 is measured in the direction of the target vehicle's heading. The heading source will be "Robot_Head" in dual antenna mode or when IMU integration is enabled. It will use the position-derived heading when in single antenna mode.
|
m |
| LatRtg_st1 |
The lateral distance between the nearest vehicle points of the Subject Vehicle and Static Target 1 is measured at right angles to the target vehicle's heading. The heading source will be "Robot_Head" in dual antenna mode or when IMU integration is enabled. It will use the position-derived heading when in single antenna mode.
|
m |
| Angle_st1 |
The angle between the nearest vehicle points of the Subject Vehicle and Static Target 1, with respect to the subject vehicle's heading. The heading source will be "Robot_Head" in dual antenna mode or when IMU integration is enabled. it will use the position-derived heading in single antenna mode.
|
° |
| Latdif_st1 |
The difference in latitudes of the Subject Vehicle and Static Target 1. Note: This is the difference in vehicle position and not the vehicle offset point. |
minutes |
| Lngdiff_st1 |
The difference in longitude of the Subject Vehicle and Static Target 1. Note: This is the difference in vehicle position and not the vehicle offset point. |
minutes |
| LngSsv_st1 |
The difference in speed between the Subject Vehicle and Static Target 1 in the longitudinal direction, with respect to the subject vehicle's heading. Calculated from the rate of change of the longitudinal range.
|
kmh |
| LatSsv_st1 |
The speed between the Subject Vehicle and Static Target 1 in the lateral direction, at right angles to the subject vehicle's heading. Calculated from the rate of change of the lateral range.
|
kmh |
| T2Ctg_st1 |
The time to collision between the Subject Vehicle and Static Target 1, based on Static Target 1's heading. The heading source will be "Robot_Head" in dual antenna mode or when IMU integration is enabled. It will use the position-derived heading in single antenna mode.
|
s |
| Yawdif_st1 |
The difference between the heading of the Subject Vehicle and Static Target 1. The heading source will be "Robot_Head" in dual antenna mode or when IMU integration is enabled. It will use the position-derived heading in single antenna mode. |
° |
| Pntsv_st1 | The Subject Vehicle's current contact point referenced in the subject-to-target-vehicle ADAS calculations. | |
| Pnttg_st1 | The Target's current contact point referenced in the subject-to-target-vehicle ADAS calculations. | |
| TargetType-st1 |
Defines whether the target is a Remote VBOX Target or a Static Target. This will read 1 for a Remote VBOX Target and 2 for a Static Target. |
|
| X_Pos-st1 | The position of Static Target 1 on the X-axis, as defined by the local coordinate frame. | m |
| Y_Pos-st1 | The position of Static Target 1 on the Y-axis, as defined by the local coordinate frame. | m |