IMU04
Inertial Measurement Unit (RLVBIMU04)
|
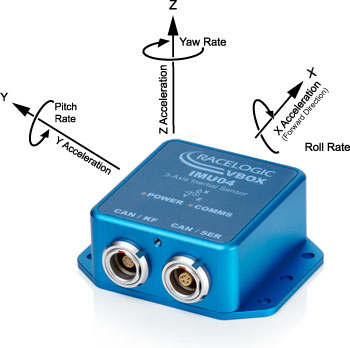
Racelogic's Inertial Measurement Unit (RLVBIMU04) provides highly accurate measurements of pitch, roll, and yaw rate using three rate gyros, as well as x, y and z acceleration via three accelerometers. The CAN-based unit is temperature compensated and has improved calibration and stability. The RLVBIMU04 is designed for use either as a standalone sensor with simple connection and configuration via the CAN bus interface, or for use with VBOX GPS data loggers. When used in conjunction with VBOX 3i, data from the IMU can be seamlessly integrated with GPS to produce pitch and roll angle accurate to 0.06˚ (RMS) as well as smoother velocity data. This ensures GPS data even when satellite reception is interrupted. The IMU is constructed with a splash-proof casing, which is rated to a limited ingress IP rating of IP67*, making it ideal for use on boats or in harsh environments, as well as automotive testing. Using synchronous 16-bit sampling for each of the internal sensors provides a high degree of accuracy, with yaw rate resolution typically 0.0137 degrees per second and acceleration resolution down to 1.5 mg. *providing unused connectors are fitted with Lemo bungs (RLACS080) |
 |