IMU Kalman Filter – VBOX 3i

Introduction
VBOX 3i has the capability of integrating the GPS data with inertial data from the IMU03 or IMU04 Inertial Measurement Unit in Real-Time, allowing accurate filtering and smoothing of the following parameters:
- Latitude
- Longitude
- Velocity
- Heading
- Height
- Vertical Velocity
The advantage of VBOX 3i - IMU integration over non-IMU Kalman filtering is that the Kalman filter is using physical inertial measurements from the IMU and GPS engine together. This allows it to rely on IMU data when GPS signal quality is bad or absent (for a short duration).
Noisy and intermittent GPS Signal
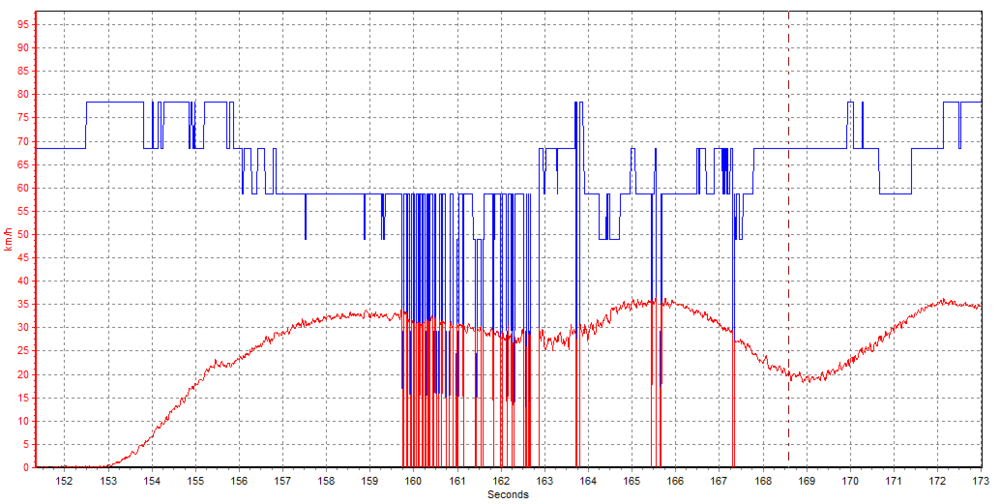
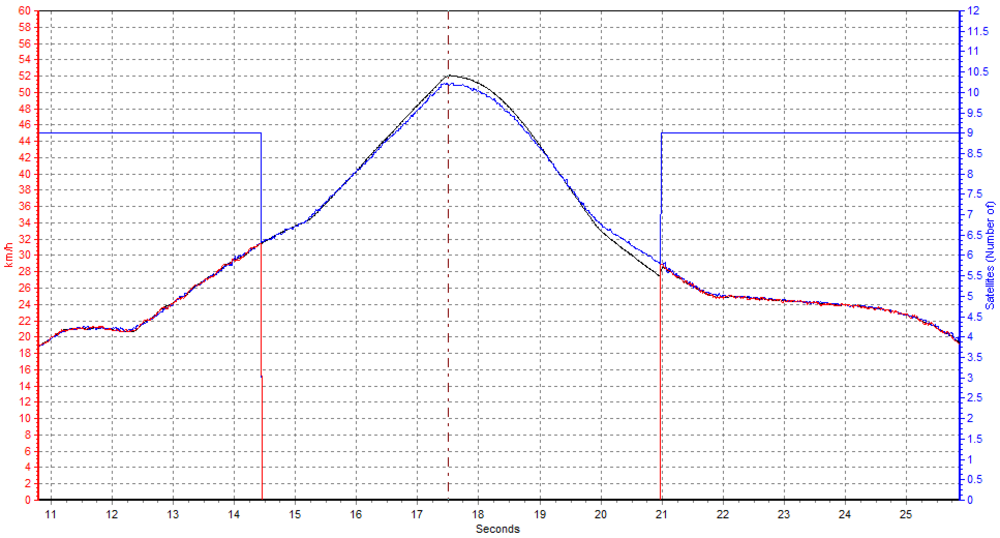
The Racelogic Kalman filter is capable of using GPS measurement data and IMU inertial measurement data together to compensate for GPS dropouts or noise. Below is a plot of the number of satellites (blue) and GPS velocity (red) which is experiencing noise then dropouts due to the vehicles environment.
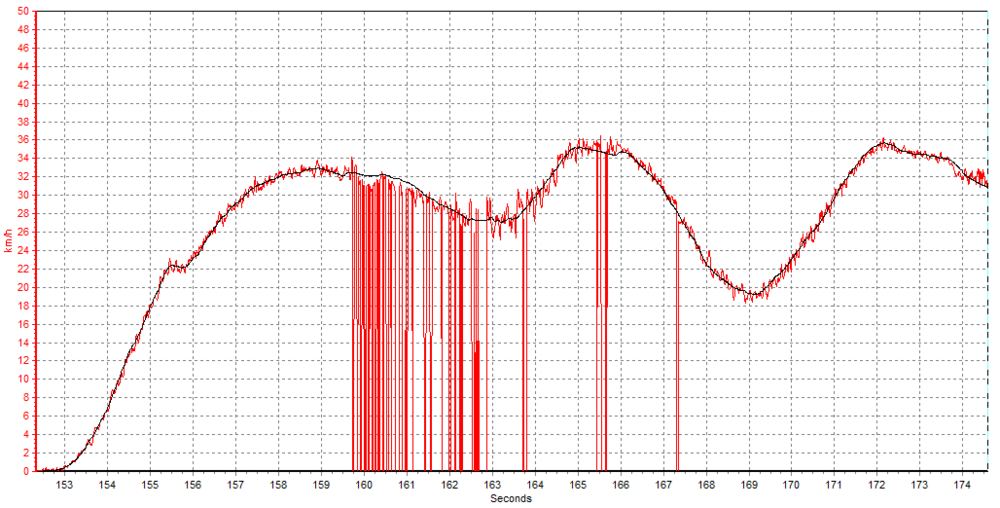
The plot below illustrates the difference in quality between the Kalman filter derived velocity (black) compared to the velocity derived from GPS alone (red).
The Kalman derived velocity can be seen to be a very accurate estimation of the velocity of the vehicle despite the adverse conditions.
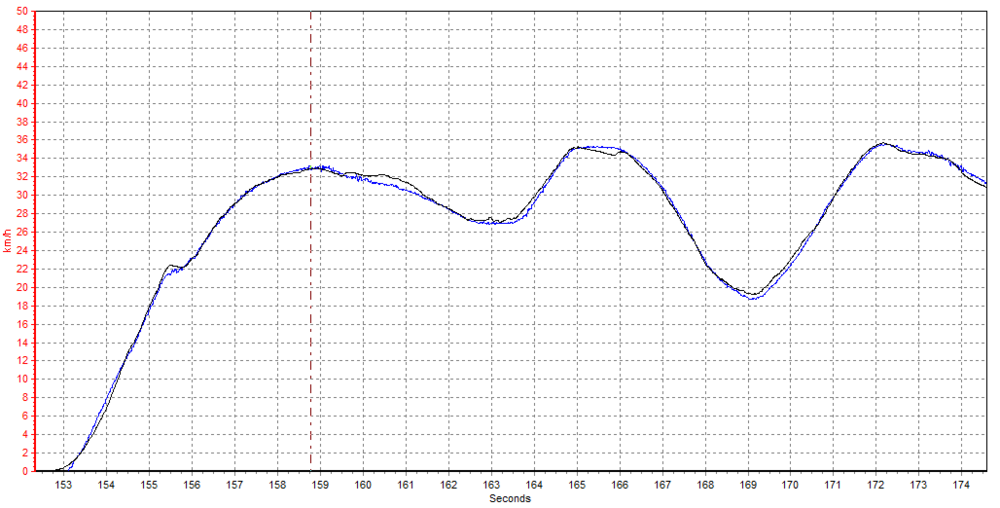
To illustrate the accuracy of the Kalman derived velocity, below is the the Kalman derived velocity in black and the wheel speed derived velocity in blue.
Long duration dropouts
The plot below shows a complete GPS dropout of approximately 6.5 seconds.
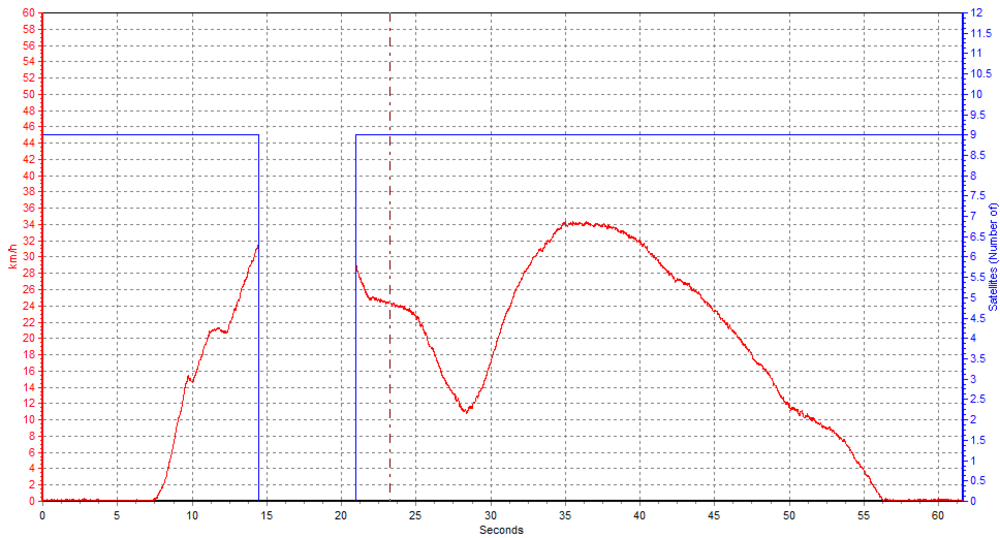
Comparing the Kalman derived velocity (black) to the Average Wheel speed (blue) you can see that even with no GPS input the Kalman estimate is very good when relying solely on IMU data.
Hardware configuration
Please see the VBOX 3i manual 'IMU Integration' page for details of how to configure hardware.
Firstly, VBOX 3i needs to be configured to use the IMU data it is connected to.
The VBOX Kalman filter module is designed to take a standard .vbo file that has been logged under poor conditions (for example in close proximity to trees and buildings) and from this generate another .vbo file with more accurate speed and position data.
The reason the Kalman filter can improve raw data is because the position and speed are measured using two different methods in the original .vbo file; speed is measured using Doppler shift, and position is measured using normal GPS trilateration. Speed and position are related very closely, which means you can use speed to calculate position, and vice-versa.
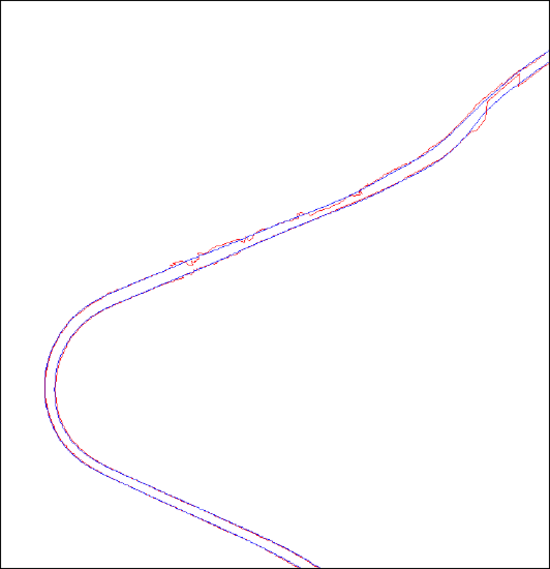
As an example of the position smoothing, the chart below is a circuit outline taken at the Nurburgring. In this file, trees close to the edges of the track have caused poor satellite reception resulting in noise and steps in the data.
The original file is indicated by the red trace and the Kalman filtered version by the blue trace. As can be seen in the blue trace, the Kalman filter has correlated positional and speed data to remove the steps in position without the loss of data that would occur with other filtering methods.
 |
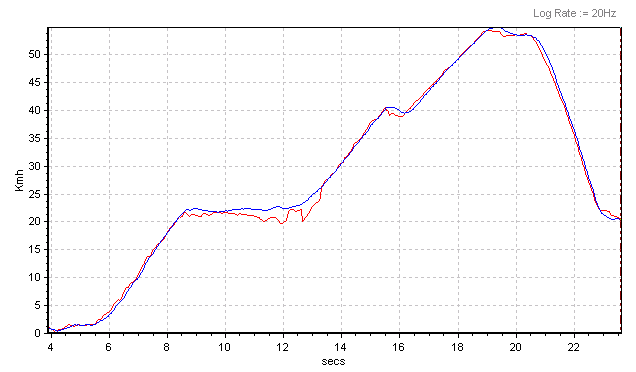 |
The speed data shown on the right shows the noisy original in red and the Kalman filtered in blue.
Note: If you are measuring braking distance, the Kalman filter must not be used.
Channels
Covariance
These are Kalman filter diagnostic channels used to help Racelogic troubleshoot and improve the Kalman filter in different environments/ conditions.
POSCov_xx
POSCov_yy
POSCov_zz
VELCov_xx
VELCov_yy
VELCov_zz
T1
Channel specifically used to track the synchronisation between the IMU and VBOX.
Note: Covariance and T1 channels are calculated in the .vbo file by default when IMU kalman filter integration is enabled.
Benefits of IMU and Kalman Filter Integration for Slip Angle Measurement
Heading will be processed by the Kalman filter and translated slip angles will be assisted by the IMU connection. This results in a cleaner and lever arm corrected slip angle and translated slip angle parameter set. For this reason we would recommend IMU Kalman filter for slip angle measurement applications.
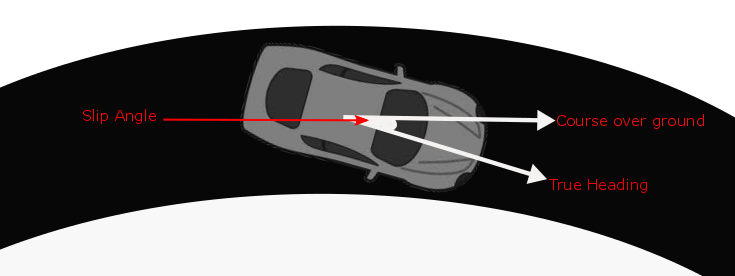
What is Slip Angle?
Slip angle from a VBOX 3iD/VBOX 3iDR is the difference between the direction a vehicle is traveling (course over ground measured from the primary GPS/GNSS antenna), known as the Heading, and the direction that the body of the vehicle is pointing (measured using the dual antenna GPS/GNSS antennas), known as the True Heading.
Slip angle and translated slip angle parameters are calculated from these two GPS/GNSS derived components.
Heading
When the IMU Kalman filter is running, the Heading parameter will be processed by the Kalman filter, giving a cleaner heading with Lever Arm compensation. This can be seen by comparing Heading to Raw Heading. This ‘cleaner’ Heading parameter is then used in the Slip angle and Translated slip angle calculations.
True Heading
True Heading channel is not processed by the Kalman Filter, however when an IMU is connected, the VBOX 3iSL/ VBOX 3iDR will use the IMU’s Yaw rate during translated slip angle calculations. The IMU yaw rate has a lower noise level than the dual antenna yaw rate, resulting in a cleaner translated slip angle measurement parameter set. Note, this will not have any impact on the standard Slip Angle channel as it does not require Yaw Rate for the calculation. Also note that the Kalman filter does not need to be enabled to get this additional benefit.
Note: If True Heading drops out, no Slip Angle calculations will be made.